Api gpio #
Para agilizar el desarrollo y desacoplar los módulos de alto nivel de los detalles del hardware, es buena idea desarrollar una api/driver para cada periférico a utilizar, dándonos la oportunidad de reutilizar el código desarrollado en otros proyectos.
En esta entrada desarrollaremos un módulo que nos permita crear acceder a los pines en el atmega328p de una manera simple.
Requerimientos #
Los gpio’s son los periféricos más utilizados en cualquier desarrollo de software embebido, es necesario desarrollar una api para los mismos.
Implementación #
Cuando hablamos de gpios, lo que nos interesa es hacer una de las siguientes operaciones:
- Establecer la dirección del pin (entrada/salida).
- Establecer el nivel del pin (alto/bajo).
- Obtener el estado del pin(alto/bajo)
Es natural iniciar especificando estas tres operaciones en forma de funciones:
void gpio_setPinDirection(Pin * pin, PIN_DIR direction)
{
}
void gpio_setPinLevel(Pin * pin, PIN_LEVEL level)
{
}
PIN_LEVEL gpio_pinLevel(Pin * pin)
{
}
Comencemos por establecer la dirección, Pin es una estructura que contiene
toda la información relevante sobre el pin, (numero, ddrx, portx, pinx):
void gpio_setPinDirection(Pin * pin, PIN_DIR direction)
{
if(direction == INPUT)
*pin->ddrx &= ~(1<<pin->number);
else if(direction == OUTPUT)
*pin->ddrx |= 1<<pin->number;
}
muy simple, tan solo revisamos la dirección y asignamos usando el operador de indirección, el nivel se implementa de manera prácticamente idéntica.
void gpio_setPinLevel(Pin * pin, PIN_LEVEL level)
{
if(level == LOW)
*pin->portx &= ~(1<<pin->number);
else if(level == HIGH)
*pin->portx |= 1<<pin->number;
}
Finalmente se requiere obtener el nivel del pin, el razonamiento es el mismo:
PIN_LEVEL gpio_pinLevel(Pin * pin)
{
if (*pin->pinx & (1<<pin->number))
return HIGH;
else
return LOW;
}
Todo muy simple, pero necesitamos una función que cree los pines y les asigne sus valores, la interfaz del módulo es la siguiente:
#ifndef GPIO_H
#define GPIO_H
#include <stdint.h>
typedef enum {INPUT=0, OUTPUT} PIN_DIR;
typedef enum {LOW=0, HIGH} PIN_LEVEL;
typedef struct Pin{
uint8_t number;
volatile uint8_t *ddrx;
volatile uint8_t *portx;
volatile uint8_t *pinx;
}Pin;
Pin gpio_create(uint8_t pin_number, PIN_DIR direction, PIN_LEVEL level);
void gpio_setPinDirection(Pin * pin, PIN_DIR direction);
void gpio_setPinLevel(Pin * pin, PIN_LEVEL level);
PIN_LEVEL gpio_pinLevel(Pin * pin);
#endif// GPIO_H
La complejidad de este módulo se centra en la función gpio_create, el usuario
debe indicar el número de pin, el atmega328p en paquete DIP tiene un total de
28 pines, de los cuales la gran mayoría pertenecen a los puertos gpio, sin
embargo no hay ninguna forma de establecer una relación entre el número de pin
físico
y el puerto al que pertenece, es decir si yo indico el pin 4, no existe
una función registro o ente que me indique que tal pin físico pertenece al gpio
PD2 del puerto D.
Para establecer una relación se propone crear una tabla (lookup table), con un arreglo.
enum {portB, portC, portD};
const int8_t gpio_table[][2] = {
{-1, -1}, //pin 1
{portD, PD0},
{portD, PD1},
{portD, PD2},
{portD, PD3},
{portD, PD4},
{-1, -1}, //Vcc
{-1, -1}, //Gnd
{portB, PB6},
{portB, PB7},
{portD, PD5},
{portD, PD6},
{portD, PD7},
{portB, PB0}, //pin 14
{portB, PB1},
{portB, PB2},
{portB, PB3},
{portB, PB4},
{portB, PB5},
{-1, -1}, //AVcc
{-1, -1}, //ARef
{-1, -1}, //Gnd
{portC, PC0},
{portC, PC1},
{portC, PC2},
{portC, PC3},
{portC, PC4},
{portC, PC5}, //pin 28
};
De esta forma es posible consultar que puerto y que pin gpio corresponde a cada pin físico del microcontrolador:
//por ejemplo
uint8_t gpio_port = gpio_table[pin][0];
uint8_t gpio_pin = gpio_table[pin][1];
Regresando a la función gpio_create, antes de establecer la dirección y
nivel del pin, se requiere rellenar la estructura, se inicia con:
Pin gpio_create(uint8_t pin_number, PIN_DIR direction, PIN_LEVEL level)
{
uint8_t gpio_port = gpio_table[pin_number][0];
uint8_t gpio_pin = gpio_table[pin_number][1];
Pin pin = {.number = gpio_pin
};
}
Sin embargo aunque sabemos el puerto, no sabemos los registros, nuevamente se hacer uso de lookup tables,
volatile uint8_t * const port_table[] = {
&PORTB,
&PORTC,
&PORTD
};
volatile uint8_t * const ddr_table[] = {
&DDRB,
&DDRC,
&DDRD
};
volatile uint8_t * const pin_table[] = {
&PINB,
&PINC,
&PIND
};
Entonces ahora si podemos registrar la información.
Pin gpio_create(uint8_t pin_number, PIN_DIR direction, PIN_LEVEL level)
{
uint8_t gpio_port = gpio_table[pin_number][0];
volatile uint8_t * ddrx = ddr_table[gpio_port];
volatile uint8_t * portx = port_table[gpio_port];
volatile uint8_t * pinx = pin_table[gpio_port];
uint8_t gpio_pin = gpio_table[pin_number][1];
Pin pin = {.number = gpio_pin,
.ddrx = ddrx,
.portx = portx,
.pinx = pinx
};
}
Finalmente establecemos la dirección, su nivel y retornamos el pin creado:
Pin gpio_create(uint8_t pin_number, PIN_DIR direction, PIN_LEVEL level)
{
uint8_t gpio_port = gpio_table[pin_number][0];
volatile uint8_t * ddrx = ddr_table[gpio_port];
volatile uint8_t * portx = port_table[gpio_port];
volatile uint8_t * pinx = pin_table[gpio_port];
uint8_t gpio_pin = gpio_table[pin_number][1];
Pin pin = {.number = gpio_pin,
.ddrx = ddrx,
.portx = portx,
.pinx = pinx
};
gpio_setPinDirection(&pin, direction);
gpio_setPinLevel(&pin, level);
return pin;
}
Protección #
La interfaz es pública, un usuario puede tener la mala fortuna de crear un pin con un número incorrecto, para evitar esto existen varias aproximaciones, desde detener el microcontrolador hasta programar defensivamente cada uno de los posible casos de error, particularmente yo prefiero detener el programa cuando de funciones create o init se trata y revisar cada caso particular en las otras funciones.
Para detener el programa si el usuario ha introducido un pin incorrecto se
sugiere utilizar la biblioteca assert.h, el funcionamiento es simple:
assert(true); //continua la ejecución
assert(false); //detiene la ejecución
Gracias a la lookup table de pines es fácil identificar si un pin es incorrecto,
por ejemplo el pin 7 pertenece a la alimentación y no puede ser usado como
gpio, al obtener el puerto de la tabla, obtenemos un -1, por lo tanto si
hacemos un assert del puerto podemos verificar la viabilidad del pin.
Pin gpio_create(uint8_t pin_number, PIN_DIR direction, PIN_LEVEL level)
{
uint8_t gpio_port = gpio_table[pin_number][0];
assert(gpio_port != -1); //¿pin valido?
volatile uint8_t * ddrx = ddr_table[gpio_port];
volatile uint8_t * portx = port_table[gpio_port];
volatile uint8_t * pinx = pin_table[gpio_port];
uint8_t gpio_pin = gpio_table[pin_number][1];
Pin pin = {.number = gpio_pin,
.ddrx = ddrx,
.portx = portx,
.pinx = pinx
};
gpio_setPinDirection(&pin, direction);
gpio_setPinLevel(&pin, level);
return pin;
}
En otra entrada mejoraremos el assert para que sea más ilustrativo, por ahora esto funciona, el resto de funciones están protegidas por los if’s y no requieren mayor atención.
Main #
Para probar nuestra flamante biblioteca, se propone el programa:
#include "gpio.h"
#define F_CPU 16000000UL
#include <util/delay.h>
int main(void)
{
Pin led = gpio_create(19, OUTPUT, LOW);
while(1){
gpio_setPinLevel(&led, HIGH);
_delay_ms(1000);
gpio_setPinLevel(&led, LOW);
_delay_ms(1000);
}
}
Compilado y subido el led comienza a parpadear con un periodo de 2 segundos.
Optimizar ram #
Observando el tamaño del binario obtengo la siguiente información:
$ avr-size a.out --format=avr --mcu=atmega328p
AVR Memory Usage
----------------
Device: atmega328p
Program: 768 bytes (2.3% Full)
(.text + .data + .bootloader)
Data: 76 bytes (3.7% Full)
(.data + .bss + .noinit)
El módulo utiliza una cantidad importante de memoria ram, las tablas son las responsables.
En la arquitectura avr existen entre otras, dos espacios de memoria importantes, la memoria de programa y la memoria ram, la memoria de programa se almacena en la memoria flash del microcontrolador y las variables se almacenan en la memoria ram (Data), con una capacidad de 32kB y 2kB respectivamente. La arquitectura dota de un bus diferente para cada una de estas memorias, pudiéndose acceder a una región de ambas al mismo tiempo, resultando en un mejor rendimiento, sin embargo tenemos mucha flash y poca ram, ¿será posible almacenar variables en flash?, la respuesta corta es si, sin embargo la ejecución normal del programa establece que la memoria flash es de solo lectura, volviéndose un espacio inviable para las variables, pero siendo posible almacenar las constantes en flash.
Para ello haremos uso de atributos, los atributos son modificadores que
indicamos a las declaraciones, permitiéndoos modificar el comportamiento
de las mismas, los atributos son altamente dependientes del entorno, compilador,
arquitectura del microcontrolador, etc, por lo que añadirlos hace nula la
portabilidad. Sin embargo estamos desarrollando un módulo de un periférico igualmente
no es portable por naturaleza. Los atributos se asignan con __attribute__
sin embargo la biblioteca avr/pgmspace.h, nos ofrece un macro para facilitarnos
el trabajo:
#include <avr/pgmspace.h>
const int8_t gpio_table[][2] PROGMEM = {
Con esta simple modificación ahora el arreglo gpio_table se ha almacenado en
memoria flash, realizando la medición se obtiene:
AVR Memory Usage
----------------
Device: atmega328p
Program: 768 bytes (2.3% Full)
(.text + .data + .bootloader)
Data: 18 bytes (0.9% Full)
(.data + .bss + .noinit)
La memoria ram se ha reducido considerablemente.
Sin embargo el programa ha dejado de funcionar, pues la ejecución normal espera
que el arreglo este en espacio de ram, hay que indicar que el arreglo está en
flash siempre que se requiere leer el arreglo. Para leer el arreglo basta con
utilizar la función pgm_read_byte cuyo argumento es la dirección del arreglo
en ram:
uint8_t gpio_port = pgm_read_byte(&gpio_table[pin_number][0]);
uint8_t gpio_pin = pgm_read_byte(&gpio_table[pin_number][1]);
Por supuesto lo mismo aplica para las otras tablas, sin embargo lo
que guardan no son números si no apuntadores, avr/pgmspace.h también tiene
una función para ellos, pgm_read_ptr
volatile uint8_t * ddrx = pgm_read_ptr(&ddr_table[gpio_port]);
volatile uint8_t * portx = pgm_read_ptr(&port_table[gpio_port]);
volatile uint8_t * pinx = pgm_read_ptr(&pin_table[gpio_port]);
nuevamente midamos el tamaño del binario:
AVR Memory Usage
----------------
Device: atmega328p
Program: 748 bytes (2.3% Full)
(.text + .data + .bootloader)
Data: 0 bytes (0.0% Full)
(.data + .bss + .noinit)
Lo cual es impresionante e indica que no hemos programado nada, tan solo
hicimos wiring y si compilamos optimizando com -Os, obtenemos:
AVR Memory Usage
----------------
Device: atmega328p
Program: 658 bytes (2.0% Full)
(.text + .data + .bootloader)
Data: 0 bytes (0.0% Full)
(.data + .bss + .noinit)
Me doy por satisfecho.
Por supuesto lo anterior tiene desventajas y es un pequeño incremento en la velocidad de acceso, lo que no es un problema pues las tablas solo se usan una vez cuando se crea un pin, así hemos llegado a otro dogma de la programación:
La optimización temprana es el origen de todos los males
Optimizando Flash #
Aunque 658 bytes no son demasiados, existen microcontroladores que tiene una cantidad de flash muy reducida, el atmega8 tiene un total de 8kB de flash y 32 pines, una implementación como esta tomaría alrededor del 10% del total de flash, algo inaceptable.
La tabla de pines es costosa en tamaño, una forma de arreglar esto último implica un cambio radical en el diseño. Se propone que sea el usuario quien indique el puerto y el pin gpio y olvidarnos por completo del pin físico.
typedef enum {portB, portC, portD}PORTN;
Pin gpio_create(PORTN port, uint8_t pin_gpio, PIN_DIR direction, PIN_LEVEL level);
Sería fantástico poder evaluar las tablas sin tener que guardarlas, pero
¿realmente requiero tener estas tablas?, no lo había pensado pero los registros
ya están ordenados en forma de arreglos, ¿para que los estoy guardando en otras
tablas?,
 fuente :https://www.microchip.com/
fuente :https://www.microchip.com/
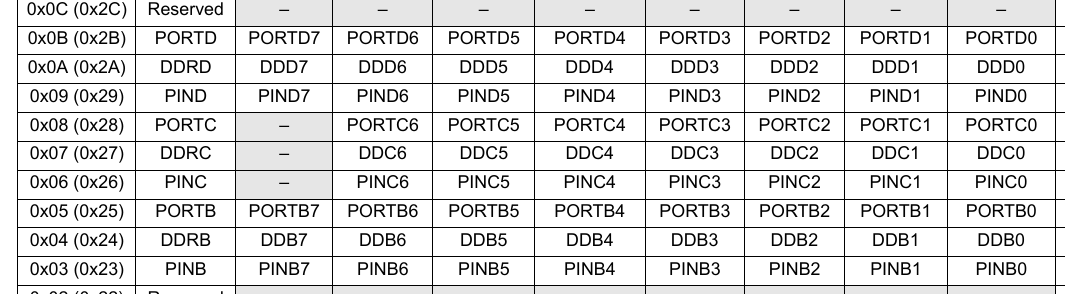
Los registros tiene una dirección en memoria, basta con “apuntar” hacia esa
dirección para tener acceso al registro. La biblioteca avr/sfr_defs.h nos
hace las cosas aun más fáciles, nos provee de la función, _SFR_IO8,
permitiéndonos acceder a cualquier área de memoria por medio de su dirección,
por ejemplo si requerimos acceder al registro DDRB y asignarle un valor:
_SFR_IO8(0x04) = 1<<PB5;
Aprovechando la forma en la que están arreglados los registros en memoria podemos únicamente guardar el indice y evitamos guardar los registros.
typedef enum {portB=0x03, portC=0x06, portD=0x09}PORTBASE;
typedef struct Pin{
uint8_t gpio_pin;
PORTBASE port_base;
}Pin;
Pin gpio_create(PORTBASE port, uint8_t gpio_pin, PIN_DIR direction, PIN_LEVEL level);
Las funciones para establecer la dirección y nivel deben ser cambiadas para manejar los cambios:
void gpio_setPinDirection(Pin * pin, PIN_DIR direction)
{
if(direction == INPUT)
_SFR_IO8(pin->port_base+1) &= ~(1<<pin->gpio_pin);
else if(direction == OUTPUT)
_SFR_IO8(pin->port_base+1) |= 1<<pin->gpio_pin;
}
void gpio_setPinLevel(Pin * pin, PIN_LEVEL level)
{
if(level == LOW)
_SFR_IO8(pin->port_base+2) &= ~(1<<pin->gpio_pin);
else if(level == HIGH)
_SFR_IO8(pin->port_base+2) |= 1<<pin->gpio_pin;
}
Finalmente actualizamos la función para crear un pin:
Pin gpio_create(PORTBASE port, uint8_t pin_gpio, PIN_DIR direction, PIN_LEVEL level)
{
assert(port == portB || port == portC || port == portD);
assert(pin_gpio < 8);
Pin pin = {.gpio_pin = pin_gpio,
.port_base = port
};
gpio_setPinDirection(&pin, direction);
gpio_setPinLevel(&pin, level);
return pin;
}
Compilando, obtengo los siguientes resultados:
AVR Memory Usage
----------------
Device: atmega328p
Program: 506 bytes (1.5% Full)
(.text + .data + .bootloader)
Data: 0 bytes (0.0% Full)
(.data + .bss + .noinit)
Comentarios finales #
La intensión de desarrollar esta biblioteca tiene varios objetivos en principio es aprender y en segundo lugar se debe a el principio de inversión de dependencias, el cual indica que los módulos de alto nivel no deben depender de los módulos de bajo nivel, con esta biblioteca he logrado desacoplar el concepto de gpio de los registros, permitiéndome “inyectar” instancias de pines en módulos de alto nivel, de tal forma que los módulos que alto nivel no conocen nada de los pines, ni su registro, ni su número, ni su locación, lo único que conocen es que se pueden configurar como entrada/salida y que se pueden encender/apagar, esto tiene la gran, gran, grandiosa ventaja de que los módulos de alto nivel se vuelven independientes de la plataforma, arquitectura, hardware, etc, pudiendo ser ejecutados en avr, cortex-m, linux, windows, tostadoras, licuadoras, lavadoras, etc.